
居家照護機器人輔助系統 Home Care Robot-Aided System
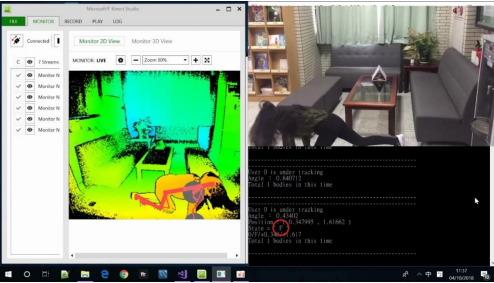
「Home Care Robot-Aided System 居家照護機器人輔助系統」是一款協助使用者監控自己或需要被照護者之生理狀況的輔助系統。遠距醫療居家照護已成為未來新興照護服務模式之主流發展方向。因此我們專為需要長期照護或是術後在家休養的使用者設計此款系統,將醫療照護延伸至居家環境,提供安全便利的居家照護環境。
「Home Care Robot-Aided System 居家照護機器人輔助系統」是一款協助使用者監控自己或需要被照護者之生理狀況的輔助系統。遠距醫療居家照護已成為未來新興照護服務模式之主流發展方向。因此我們專為需要長期照護或是術後在家休養的使用者設計此款系統,將醫療照護延伸至居家環境,提供安全便利的居家照護環境。
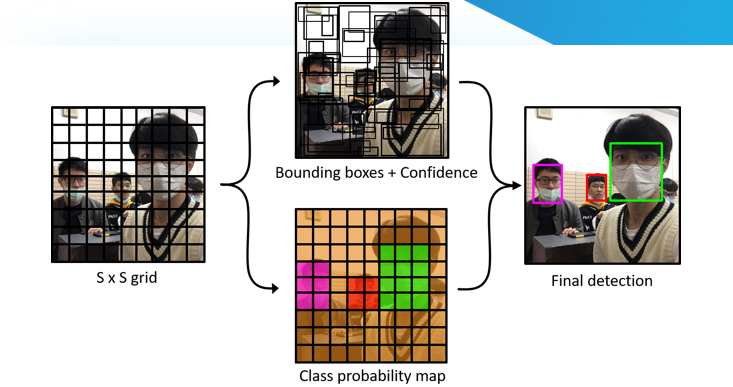
本專題研究的主旨著重在如何結合人臉辨識、口罩辨識,並透過雲端資料庫紀錄每個人出入的時間、有無戴好口罩等相關資訊,以達到有效控管人流的目的,並且在保持高準確率的情況下,盡可能優化辨識系統的效率,降低硬體需求的門檻。最後本專題在實作上以 FN8 及 YOLOv3-tiny 為主要的人臉偵測、辨識及口罩配戴辨識的網路架構,能有效降低 FaceNet 和 YOLOv3 原本對硬體設備計算能力的要求並成功製作出能即時運算的人臉辨識及口罩辨識系統。
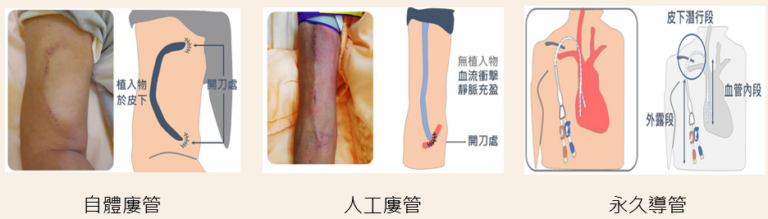
「高光譜影像照影平台開發-用於洗腎病患動靜脈廔管」是一款協助醫護人員檢測洗腎病患是否有廔管阻塞狀況的輔助系統。大部分的洗腎病患會因為廔管的使用年限過久或是沒有定期保養廔管而導致廔管阻塞的情形。目前各種檢測廔管阻塞方式都較不精準和不夠即時,因此本專題結合高光譜影像,讓檢測廔管阻塞不再是個難題,同時讓洗腎病患不再因為廔管阻塞而困擾,也提升了洗腎病患的生活品質。在硬體方面,本專題使用了 HinaLea4200高光譜影像儀,在每次洗腎時,偵測手臂的廔管狀況,並利用高光譜影像的特性-不同波段對人體血管的反射率不同,收集各個波段的數據後進行影像處理。透過每一次的取像,讓醫護人員可以監控廔管的近期狀況,同時也讓患者能得知自己目前廔管有無阻塞的情形。萬一患者有察覺異常時,也可以直接來進行取像,不再因為無法檢測廔管阻塞而造成困擾,也能讓醫護人員能有足夠的時間做出最適當的處理。
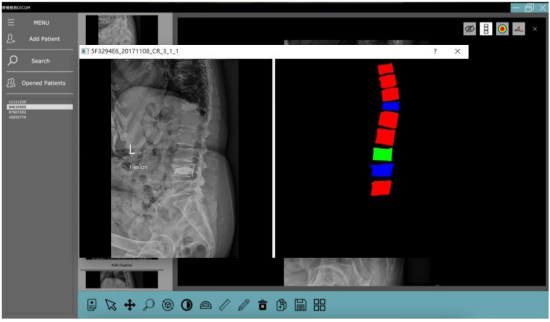
本研究主要探討椎體成形術後發生鄰近節椎體續發性骨折的分析及其預測,將建構一個預測模型,從X光影像處理、椎骨分割與計算角度與曲度等,推算出各節鄰近椎體間發生續發性骨折的機率並以類似熱區圖的方式呈現,並且設計一套圖形化人機互動介面(Graphical User Interface,GUI),除了以上功能之外希望能結合病患的相關院內資料,讓醫護人員能更方便操作與查看。希望不僅能幫助預測併發症的發生並加以預防,也能減輕人力資源在影像判讀上的消耗。
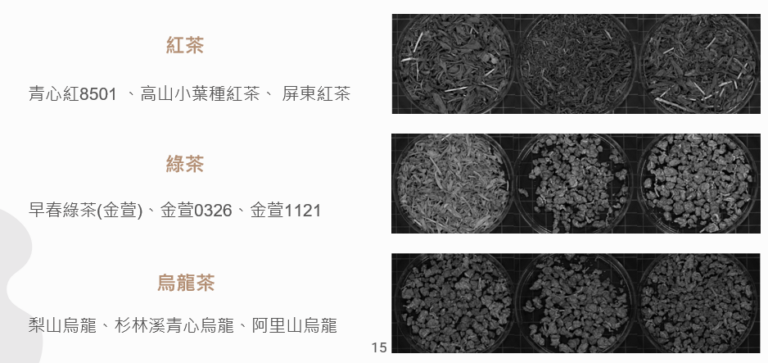
高光譜成像分析為應用在茶葉上的數據分析系統,本專題在硬體方面使用了 imec Snapscan VNIR 高光譜影像儀,取得樣品的影像資料後使用 Matlab 的演算法對其去做分類及分群,也再更進一步的藉由獲得的影像資料分析出其特徵光譜,這有助於分辨樣品的不同。通過這項技術去研究茶葉的特徵光譜,我們能夠幫助消費者去分辨樣品是否混茶或是分辨其為何種茶葉,幫助消費者免於被不肖業者詐欺。