「Home Care Robot-Aided System 居家照護機器人輔助系統」是一款協助使用者監控自己或需要被照護者之生理狀況的輔助系統。基於現代人更忙於事業,沒有閒暇時間及心力照護家人,卻又放不下心家人之健康狀態;抑或是任何慢性病患、術後病患、年長者等等需要時時注意自己生理數值(Physiological value)之人,遠距醫療居家照護已成為未來新興照護服務模式之主流發展方向。因此我們專為需要長期照護或是術後在家休養的使用者設計此款系統,將醫療照護延伸至居家環境,提供安全便利的居家照護環境。
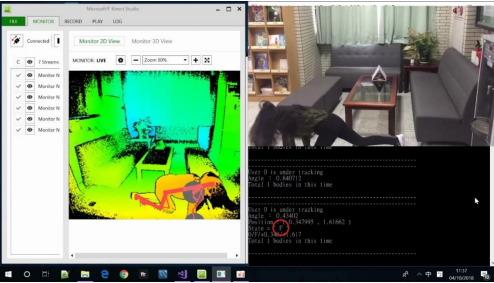
在硬體方面,我們採用 Kinect v2 深度感應器,偵測被照護者的活動狀態,且利用心電描記術(Electrocardiography,ECG)採集被照護者之心律,輔助機器人以定時提醒被照護者使用儀器進行數據測量。此外,當緊急狀況發生時,輔助機器人會立即移動到被照護者身旁,讓被照護者選擇是否需要進一步的幫助,提供適當的協助及傳送通知主要照護者。我們將整體系統簡單化並更便於使用者操作、安裝,不再因為安裝架設之問題而煩惱。在軟體方面,我們運用 Kinect 所偵測到的即時影像,在 Visual Studio 開發平台上以 C++撰寫演算法運算出人體骨架,判斷姿態如站立、坐下、躺下、或是跌倒,以進行病患活動安全性的監控;再者,病患狀態及生理資料等會上傳至雲端資料庫,並同步至照護者及被照護者之手機應用程式,以便於需要時可閱覽查詢以往之生理數值,使需居家照護者擁有更完善的生理監測系統。
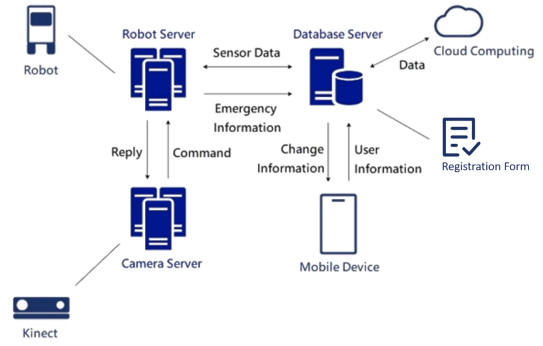
在技術上,前端我們使用了 Kinect SDK 協助深度攝影機程式編寫,使用Android Studio 以 Java 撰寫手機應用程式,以及 HTML、CSS 撰寫網頁表單供使用者註冊;後端我們則運用了 MySQL 來建設資料庫並使用 php 抓取資料,提供大量資料儲存空間以及便於管理之環境。
我們在初期先編寫深度攝影機程式,分析感應器所偵測到的使用者影像,並建構資料庫及做出 App 雛形,再將功能增加並整合,最後提高程式判斷精準度及細部修改,總體測試並發表。